







機械手臂剎車
瀏覽: 發(fā)布日期:2018年-09月-14日 09時:51分:54秒
手臂一般有3個運動:伸縮、旋轉(zhuǎn)和升降。實現(xiàn)旋轉(zhuǎn)、升降運動是由橫臂和產(chǎn)柱去完成。手臂的基本作用是將手爪移動到所需位置和承受爪抓取工件的最大重量,以及手臂本身的重量等。
此外,根據(jù)機械手運動和工作的要求,如管路、冷卻裝置、行程定位裝置和自動檢測裝置等,一般也都裝在手臂上。所以手臂的結(jié)構(gòu)、工作范圍、承載能力和動作精度都直接影響機械手的工作性能,因此在機械手臂剎車的選用就需要慎重。
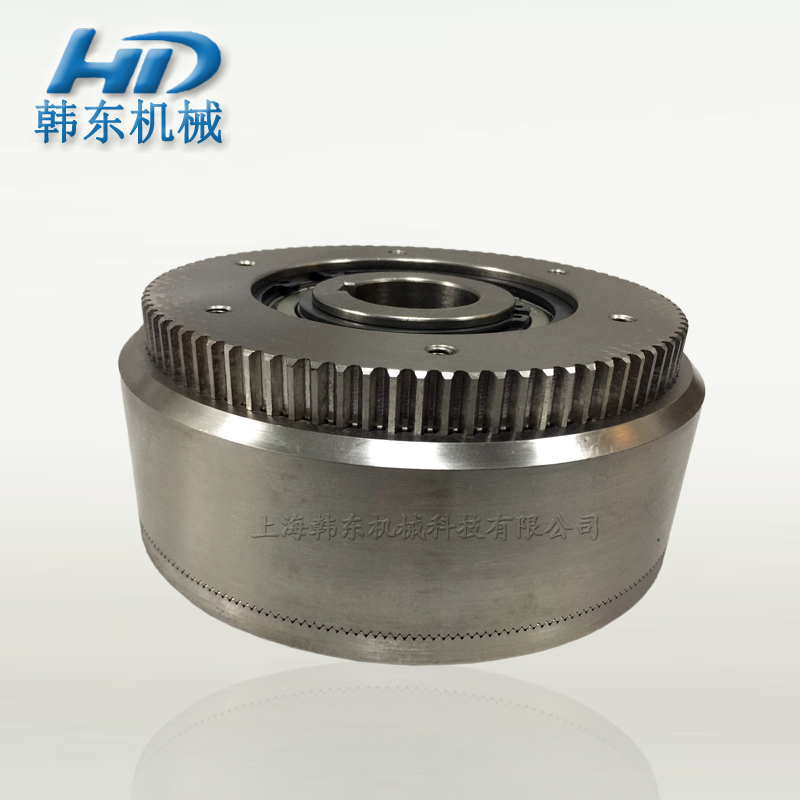
這款CBM常閉式剎車采用端面齒嵌合來制動,不易滑脫,制動器力矩大且無滑差;制動和放開均在瞬間完成,可實現(xiàn)精準(zhǔn)的定位;端面齒采用特殊工藝,強度高,耐磨性好壽命長;由于是常閉式的設(shè)計,安全性能高。



